

- Umang Sagar
- Recent article, Science and Technology
Exploring The World Of Robotics

Introduction To Robotics
Robotics is a branch of engineering and technology that deals with the design, construction, operation, and use of robots. A robot is a machine that can be programmed to perform a wide range of tasks automatically, typically with some degree of autonomy. Robots can be either stationary or mobile, and they may be used in various applications, such as manufacturing, healthcare, agriculture, space exploration, and military and defence.
Brief History of Robotics
The history of robotics dates to ancient times when automata, mechanical devices that mimic human or animal behaviour, were created for entertainment purposes. The first modern robot, the Unimate, was developed in the 1960s by George Devol and Joseph Engelberger and was used for industrial automation. Since then, robotics has advanced significantly, with robots becoming more sophisticated, versatile, and affordable.
Importance of Robotics
The importance of robotics lies in its ability to automate tasks that are repetitive, dangerous, or difficult for humans to perform, thus improving productivity, efficiency, and safety. Robotics has also opened new opportunities for innovation and creativity, leading to the development of new products, services, and industries.
Robotics involves various disciplines, such as mechanics, electronics, control systems, and computer science. A typical robot consists of several components, such as sensors, actuators, controllers, and end effectors. Sensors are used to detect and measure the environment and the robot’s state, such as position, orientation, and speed. Actuators are used to control robot’s motion, such as motors, pneumatic cylinders, and hydraulic pumps. Controllers are used to processing sensory information and generate commands for the actuators. End effectors are the tools or devices attached to the robot to perform specific tasks, such as grippers, welders, and cameras.
Robotics also involves the study of kinematics and dynamics, which are essential for understanding and controlling the robot’s motion. Kinematics deals with the geometry and motion of the robot, such as its position, velocity, and acceleration. Dynamics deals with the forces and torques acting on the robot and how they affect its motion.
In summary, robotics is a multidisciplinary field that combines engineering, science, and technology to create machines that can perform various tasks autonomously or with minimal human intervention. Robotics has many applications and benefits, such as improving productivity, efficiency, and safety. The components, kinematics, and dynamics of robotics are essential for understanding and controlling the robot’s motion.
Components Of Robotics

Robots consist of various components that work together to enable them to perform their tasks. These components include sensors, actuators, controllers, and end effectors.
Sensors:
Sensors are devices that measure physical quantities and convert them into electrical signals that can be processed by a robot’s control system. Sensors provide a robot with information about its environment, such as position, orientation, temperature, and pressure. Some common sensors used in robotics include cameras, sonars, lidars, encoders, and force/torque sensors. Cameras are used for visual sensing, while sonars and lidars are used for distance sensing. Encoders are used to measure the position and speed of a robot’s joints, and force/torque sensors are used to measure the forces and torques applied to the robot’s end effector.
Actuators:
Actuators are devices that convert electrical signals into mechanical motion. Actuators are used to control the robot’s movement and manipulate its environment. Some common types of actuators used in robotics include electric motors, pneumatic cylinders, hydraulic pumps, and solenoids. Electric motors are used for precise and continuous motion control, while pneumatic cylinders and hydraulic pumps are used for high-force and speed applications. Solenoids are used for small, quick movements.
Controllers:
Controllers are devices that process sensor data and generate commands for the actuators. Controllers are responsible for the robot’s motion planning, trajectory generation, and feedback control. The feedback control loop is an essential component of a robot’s controller that enables it to adjust its motion based on sensor feedback. Some common types of controllers used in robotics include microcontrollers, programmable logic controllers (PLCs), and industrial PCs.
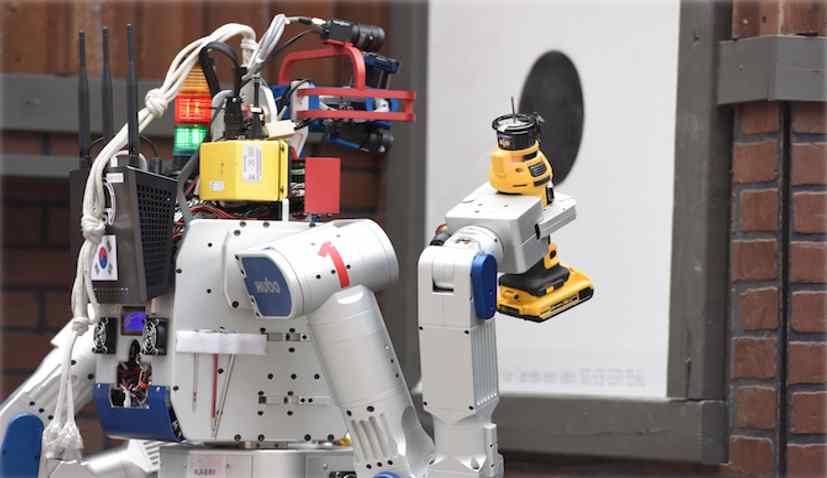
End effectors:
End effectors are the tools or devices attached to a robot’s arm or body to perform specific tasks. End effectors are designed based on the application requirements and can be grippers, welders, cutting tools, or sensors. Some end effectors are designed for manipulation, such as grippers that can grasp and release objects. Others are designed for sensing, such as cameras that can capture images and videos.
The components of robotics play a vital role in enabling robots to perform their tasks. Sensors provide a robot with information about its environment, while actuators control its movement and manipulation. Controllers process sensor data and generate commands for the actuators, while end effectors are the tools or devices attached to the robot to perform specific tasks. Understanding these components is essential for designing and controlling a robot’s behaviour.
Types Of Robots
Industrial Robots:
Industrial robots are designed for manufacturing and assembly line applications. They are commonly used in factories and are designed to perform repetitive tasks with high precision, speed, and repeatability. They are equipped with various sensors and end-effectors, such as grippers, welding torches, or cutting tools. Industrial robots can operate 24/7 and are programmed to perform specific tasks, such as welding, painting, or material handling.
Service Robots:
Service robots are designed to perform tasks that are typically performed by humans. They are used in environments such as offices, hospitals, and homes. Service robots are designed to operate in unstructured environments and interact with people safely. Examples of service robots include cleaning robots, delivery robots, and medical robots. They are equipped with various sensors and cameras that enable them to navigate and interact with their environment.
Collaborative Robots:
Collaborative robots, also known as cobots, are designed to work alongside humans in a shared workspace. Cobots are designed to be safe and easy to use and can perform tasks that require both human dexterity and robot precision. They are typically smaller and lighter than traditional industrial robots and can be easily programmed or taught by workers. They are equipped with various sensors that allow them to detect and respond to human presence and movement.
Mobile Robots:
Mobile robots are designed to move around and interact with their environment. They are typically used for navigation and exploration tasks, such as search and rescue, surveillance, and inspection. Mobile robots can be either ground-based or aerial and can be autonomous or remotely controlled. They are equipped with various sensors, such as cameras, lidars, or sonars, that enable them to navigate and interact with their environment.
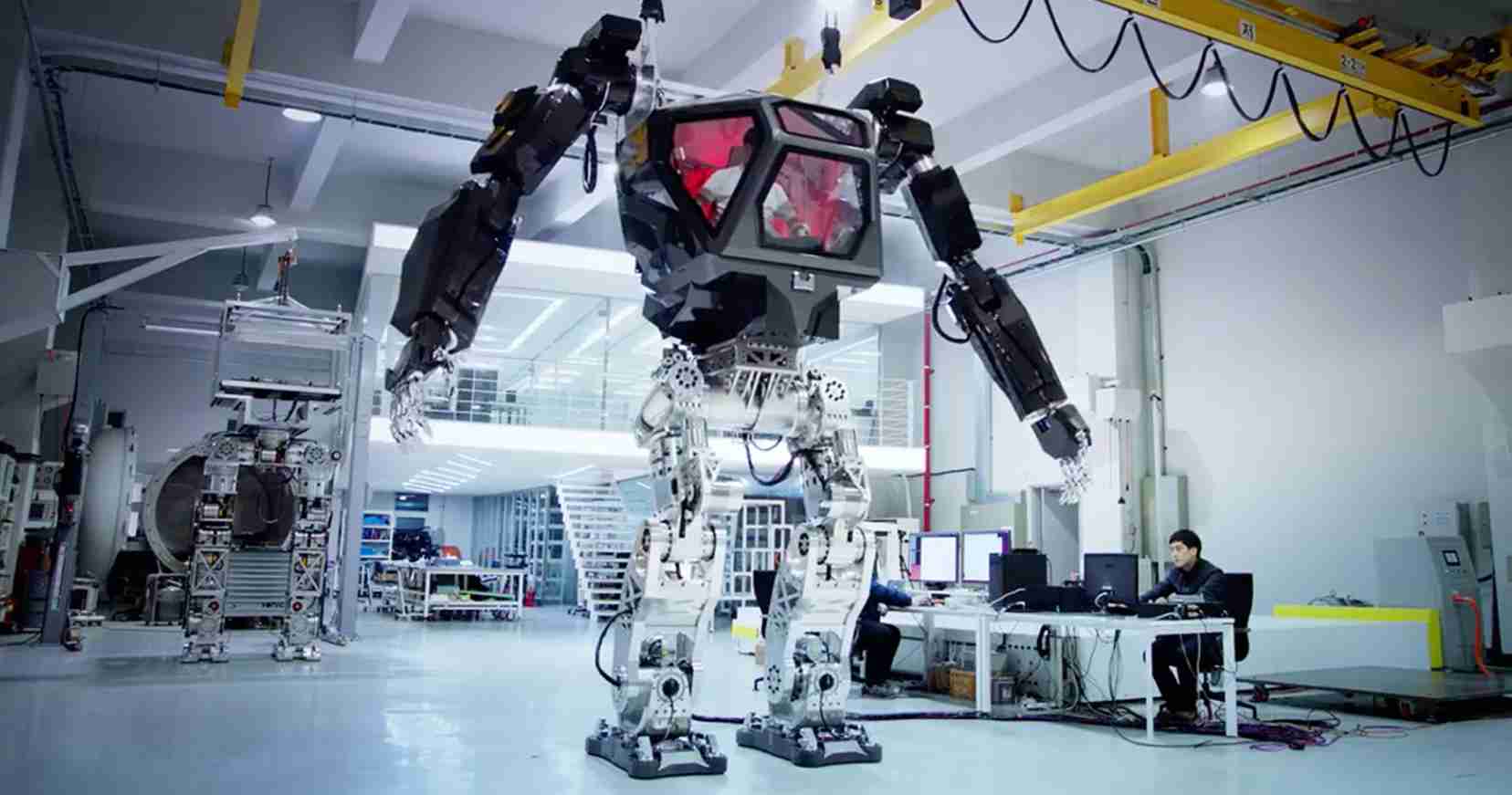
Humanoid Robots:
Humanoid robots are designed to resemble humans in appearance and behaviour. They are equipped with various sensors and actuators that allow them to perform human-like movements and interact with their environment. Humanoid robots are typically used for research and development purposes, such as studying human cognition and behaviour or developing human-like prosthetics. They are also used in entertainment and education, such as theme parks or museums.
Each type of robot is designed for a specific purpose and application. Industrial robots are designed for manufacturing and assembly line applications, service robots are designed to perform tasks that are typically performed by humans, collaborative robots are designed to work alongside humans, mobile robots are designed to move around and interact with their environment, and humanoid robots are designed to resemble humans in appearance and behaviour.
Kinematics And Dynamics
Forward Kinematics:
Forward kinematics is a method used to determine the position and orientation of the end-effector of a robot based on the angles of the joints in the robot’s kinematic chain. It involves applying the transformation matrices of each joint in the kinematic chain to compute the position and orientation of the end-effector relative to the robot’s base frame.
Inverse Kinematics:
Inverse kinematics is a method used to determine the joint angles required to position the robot’s end-effector at a specified location and orientation. It involves solving a set of nonlinear equations that relate the position and orientation of the end-effector to the angles of the robot’s joints. Inverse kinematics is commonly used in robot programming and control applications.
Kinematic Chains:
A kinematic chain is a sequence of links and joints that connects the robot’s base to its end-effector. Each joint in the chain can move in one or more degrees of freedom, allowing the end-effector to move in a specific way. Kinematic chains can be classified as serial or parallel, depending on the arrangement of their links and joints.
Dynamics of Robot Motion:
The dynamics of robot motion involves the study of the forces and torques that act on a robot’s links and joints as it moves. It includes the study of the robot’s mass, inertia, and friction, as well as the forces and torques generated by the robot’s actuators. The dynamics of robot motion are important for ensuring the robot’s stability and safety, as well as for optimizing its performance.
kinematics and dynamics are essential topics in robotics that help us understand how robots move and interact with their environment. Forward kinematics is used to determine the position and orientation of the end effector based on the angles of the joints, while inverse kinematics is used to determine the joint angles required to position the end effector at a specified location and orientation. Kinematic chains are sequences of links and joints that connect the robot’s base to its end-effector, while the dynamics of robot motion involve the study of the forces and torques that act on the robot’s links and joints as it moves.
Robot Control

Robot control is the process of generating control signals to direct the motion of a robot. Control signals can be generated by various methods, such as manual control, scripted control, or automated control. Automated control is typically used in industrial and commercial applications, where robots are required to perform repetitive tasks with high precision and accuracy.
Open-loop Control:
Open-loop control, also known as feedforward control, is a type of control system where the control signals are pre-determined based on a model of the robot’s dynamics and the desired motion trajectory. Open-loop control does not use feedback from the robot’s sensors to adjust the control signals and is therefore less accurate and less robust than closed-loop control.
Closed-loop Control:
Closed-loop control, also known as feedback control, is a type of control system where the control signals are adjusted based on feedback from the robot’s sensors. Closed-loop control can adjust the control signals in real-time to compensate for disturbances or changes in the robot’s environment and is therefore more accurate and more robust than open-loop control.
Feedback Control:
Feedback control is a type of control system where the control signals are adjusted based on feedback from the robot’s sensors. Feedback control can use various types of sensors, such as encoders, accelerometers, or cameras, to provide feedback on the robot’s position, velocity, and other parameters. The control signals are adjusted in real-time to ensure that the robot’s motion trajectory matches the desired trajectory.
Motion Planning:
Motion planning is the process of determining a sequence of robot configurations that allow the robot to move from its current position to a desired position while avoiding obstacles and satisfying constraints. Motion planning algorithms can be based on various techniques, such as graph search, optimization, or sampling-based methods. Motion planning is essential for many robotics applications, such as navigation, manipulation, and assembly.
Robotics Programming

Robot programming is the process of creating programs that direct the motion and actions of a robot. Robot programming can be done using various methods, such as teaching pendant programming, offline programming, or simulation programming.
Teaching Pendant Programming:
Teaching pendant programming is a method of programming where the robot is manually guided through a sequence of motions using a handheld device called a teaching pendant. The operator moves the robot through the desired sequence of motions, and the teaching pendant records the motion trajectory and creates a program based on the recorded data.
Teaching pendant programming is a simple and intuitive method of programming and is typically used in applications where the robot’s task is relatively simple, and the motion trajectory is predictable. For example, teaching pendant programming can be used to program a robot arm to perform a simple pick-and-place task.
Offline Programming:
Offline programming is a method of programming where the robot program is created offline, using computer-aided design (CAD) software or dedicated robot programming software. The program is then transferred to the robot for execution.
Offline programming is a more sophisticated method of programming than teaching pendant programming and is typically used in applications where the robot’s task is more complex, and the motion trajectory is less predictable. For example, offline programming can be used to program a robot to perform a welding task on a complex 3D object.
Simulation Programming:
Simulation programming is a method of programming where the robot program is created and tested in a virtual environment before being transferred to the robot for execution. The virtual environment can be created using dedicated robot simulation software or CAD software.
Simulation programming is a powerful method of programming, as it allows the programmer to test and optimize the robot program before deploying it to the robot. Simulation programming can also be used to test the robot’s behaviour in various environmental conditions and to identify potential problems before they occur.
Applications Of Robotics

Manufacturing:
One of the most common and well-established applications of robotics is in manufacturing. Robots are used extensively in industrial automation to perform tasks such as welding, painting, assembly, packaging, and quality control. These tasks are repetitive, tedious, and sometimes dangerous for humans to perform, which makes robotics an ideal solution. Robotics in manufacturing has led to increased productivity, improved quality, and reduced labor costs.
Healthcare:
Robotics is increasingly being used in healthcare, particularly in surgery. Robots can perform complex and delicate surgeries with precision, accuracy, and minimal invasiveness, resulting in reduced pain, faster recovery times, and fewer complications. Robots are also used in rehabilitation to help patients recover from injuries or disabilities by providing support and assistance with movements.
Agriculture:
Robotics has the potential to revolutionize agriculture by automating various tasks, such as planting, harvesting, and monitoring crops. Agricultural robots can use sensors and machine learning algorithms to collect data on soil conditions, moisture levels, and plant health, which can be used to optimize crop yield and reduce waste. Robotic drones can also be used to monitor crops and detect potential issues such as pests or disease outbreaks.
Space Exploration:
Robotics has played a critical role in space exploration, from the first robotic arm used on the Space Shuttle to the Mars rovers currently exploring the red planet. Robots are used to perform tasks that are too dangerous, difficult, or expensive for humans, such as repairing satellites, building space stations, and exploring other planets. Robotics is also being used to develop technologies for future space missions, such as autonomous spacecraft and robotic assistants for astronauts.
Military and Defence:
Robotics is increasingly being used in military and defence applications, such as bomb disposal, reconnaissance, and surveillance. Autonomous drones are used to gather intelligence and perform missions that are too dangerous for human pilots. Ground-based robots are used for tasks such as clearing mines, providing logistics support and providing cover fire for troops. Robotics in the military and defence is controversial due to ethical concerns around the use of autonomous weapons and the potential for unintended consequences.
In conclusion, robotics has a wide range of applications across various industries, from manufacturing and healthcare to agriculture, space exploration, and military and defence. As technology continues to advance, we can expect to see even more innovative and exciting uses for robotics in the future.
Current Developments In Robotics
Artificial Intelligence and Robotics:
Artificial intelligence (AI) and robotics are becoming increasingly integrated, enabling robots to perform tasks that were previously impossible or too complex for them. AI algorithms can be used to enable robots to perceive and interpret their environment, make decisions, and adapt to changing situations. This has led to the development of advanced robotic systems, such as autonomous vehicles, drones, and humanoid robots.
Soft Robotics:
Soft robotics is an emerging field that involves the development of robots made from soft, flexible materials, such as silicone, rubber, or elastomers. Soft robots have several advantages over traditional robots, including the ability to conform to irregular surfaces, perform delicate tasks, and interact safely with humans. Soft robotics is being used in a range of applications, such as medical devices, prosthetics, and wearable robotics.
Swarm Robotics:
Swarm robotics is a field that involves the coordination of large numbers of robots to perform a task collectively. In swarm robotics, the individual robots are relatively simple and inexpensive, but they can work together to accomplish complex tasks. Swarm robotics is being used in a range of applications, such as search and rescue, environmental monitoring, and precision agriculture.
Wearable Robotics:
Wearable robotics, also known as exoskeletons, are devices that are worn on the body to augment human strength and mobility. Wearable robotics can be used to assist people with disabilities or injuries, as well as to enhance the physical capabilities of healthy individuals. Wearable robotics are being used in a range of applications, such as rehabilitation, industrial manufacturing, and military operations.
Human-Robot Interaction:
Human-robot interaction (HRI) is a field that focuses on the development of robots that can interact with humans in a natural and intuitive way. HRI involves the study of human behaviour and cognition, as well as the design of robot interfaces and communication systems. HRI is being used in a range of applications, such as education, healthcare, and entertainment.
Challenges And Future Of Robotics
Ethical Considerations:
As robots become increasingly integrated into society, there are growing concerns about the ethical implications of their use. For example, there are concerns about the potential loss of jobs as robots automate more tasks, the potential for robots to be used in military or policing applications, and the potential for robots to be used for surveillance or other invasive purposes. There are also concerns about the impact of robots on privacy, autonomy, and human dignity.
Legal and Regulatory Issues:
The rapid development of robotics has outpaced the development of legal and regulatory frameworks to govern their use. This has created uncertainty around issues such as liability for robot malfunctions, intellectual property rights for robot inventions, and privacy and security concerns. Governments and international organizations are currently working to develop legal and regulatory frameworks to address these issues.
Safety Concerns:
Robots have the potential to cause physical harm to humans if they malfunction or are used improperly. This is especially true for industrial robots, which can be large and powerful. Safety standards and regulations are in place to ensure that robots are designed and used in a way that minimizes the risk of harm.
Social and Economic Impact:
The increasing use of robots is likely to have significant social and economic impacts. On the one hand, robots have the potential to improve productivity, reduce costs, and create new jobs in areas such as robot design, maintenance, and programming. On the other hand, robots may also displace human workers in certain industries and exacerbate income inequality.
Future Trends in Robotics:
The future of robotics is likely to be characterized by continued advances in AI, the development of more sophisticated sensors and actuators, and the integration of robots into a wide range of applications and environments. Some of the key areas of growth are likely to be in healthcare, where robots are being developed to assist with surgery, rehabilitation, and elder care, and in agriculture, where robots are being developed to assist with crop monitoring and harvesting. Other areas of growth include the development of autonomous vehicles, drones, and humanoid robots.
While the development of robotics presents many exciting opportunities, it also poses several significant challenges, particularly in the areas of ethics, legal and regulatory issues, safety, and social and economic impact. These challenges will need to be carefully managed to ensure that the benefits of robotics are realized while minimizing the risks. Nevertheless, the future of robotics looks bright, with continued advances likely to transform a wide range of industries and sectors in the years to come.
Top 13 Interesting Facts About Robotics
Robotics is a field that involves the design, construction, operation, and use of robots, which are programmable machines that can carry out a range of tasks autonomously or with human guidance.
The components of a robot typically include a power source, actuators, sensors, a control system, and an end effector (e.g. a gripper or tool).
There are many types of robots, including industrial robots, mobile robots, humanoid robots, and collaborative robots (cobots), each with different characteristics and applications.
Robotic control systems can be classified as open-loop or closed-loop (feedback) systems, depending on whether they incorporate feedback from sensors to adjust their output.
Programming is a crucial part of robotics, as it enables the robot to perform specific tasks autonomously. Programming languages used in robotics include C++, Python, and MATLAB.
Robotics applications are wide-ranging and include manufacturing, healthcare, agriculture, transportation, and space exploration.
Developments in robotics are driven by advances in areas such as artificial intelligence, machine learning, and materials science, which are enabling robots to become more versatile, efficient, and adaptable.
Challenges in robotics include ensuring safety and reliability, developing more intuitive and effective user interfaces, and addressing ethical and societal concerns surrounding the use of robots.
The future of robotics is likely to see increased use of robots in new industries and applications, as well as more sophisticated and capable robots with greater autonomy and intelligence.
Collaborative robots (cobots) are a growing trend in robotics, as they can work alongside humans in shared workspaces, enhancing productivity and efficiency.
The field of soft robotics is also emerging, which involves the use of flexible and deformable materials to create robots that can adapt to their environment and interact more naturally with humans.
Other emerging areas of robotics research include swarm robotics, which involves the coordination of large numbers of robots to achieve a common goal, and bio-inspired robotics, which draws inspiration from biological systems to design robots that are more efficient and adaptive.
Robotics is a rapidly advancing field with vast potential for innovation and impact in a range of industries and applications and will likely continue to be a key area of research and development in the coming years.